Buzz – Because He Does
01/2014 – Buzz Explained – like there is a lot to explain. Buzz is a very simple thing, not sure you can even call him a “robot”. A couple LDRs, couple LEDs, pager type motor, and an ATTiny85 brain. He really can’t determine WHERE he goes. But he does GO a little and BUZZes a lot getting around so thus the name Buzz.
Summary
Buzz came about from leftover parts again like Buford. The perf board was going to be the brains on a different micro bot and the battery holder was from a failed smaller bot. I’ve had the pager motor for some time, just never knew what to use it on. So again looking at the leftovers I thought it would be worth a try to make a vibrating mover like what Yahmez had done with his Baby Bots or Ladviens Y-Babies at but bigger and much LESS capable.

Buzz’ whole goal is to balance his “eyes” to the light. If he’s out of light
balance he buzzes around by firing off his pager motor that makes him generally
spin in one direction until he balances again. Simple stuff but fun to see him
react to changing ambient light around him.
He can also “self stimulate”
sometimes… wait, that doesn’t sound right, don’t go there, that’s not what I mean 🙂 Basically he has a timer that runs after he has balanced out the light, after the timer runs out he turns on one of his own LEDs that many times triggers a light imbalance causing him to take off buzzing around again.
Buzz’s Body
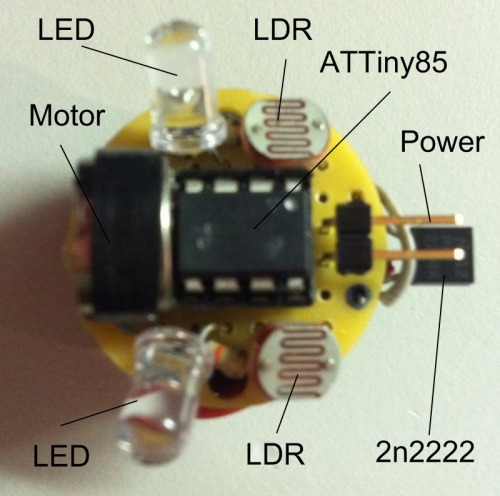
Buzz is based on a 1” perf board from Radio Shack. I already installed an 8 pin socket in it waiting for something to do with an ATTiny85. So I just added a couple LDR’s and 10K resistors, couple bright LEDs for show, 2K resistor and 2N2222 and an old pager/vibrating motor I scavenged from somewhere. The 2032 battery mount came from an old PC motherboard and is a nice fit under the 1” perf board.

Again trying to make the board look like something “live” was kind of a goal. The transistor is out front like a nose, the LDRs as eyes and the LEDs are kind of in an ear position when looking from the front of him anyhow. Not sure what the ATTiny and motor are supposed to be but it’s balanced at least.
Looking for an on/off need again I when back with a simple two position header with a jumper. Since the 2032 is not rechargeable, no special connection is required to hook a charger up to. The battery is accessible from the bottom for changing out when it runs down.
The Buzz Brain
Another ATTiny85 is used on Buzz like Buford and PuP. I’ve had the ATTiny’s for a while, only used one for BoxHeads mouth but nothing else. Now I have built three ATTiny bots in a couple weeks. The code is obviously quite simple; setup, read LDRs, look for light balance, out of balance run motor, in balance stop motor, start bored timer. Bored time expires, turn on LEDs and see what happens. That’s it so far at least. I think I will add a motor timer so I know how long he’s just sat around doing nothing for sure to allow some escape modes from sitting too long in one place. But with the sensitivity I’ve seen so far he gets Buzzing from just me moving around the room after he’s settled in somewhere.

I guess with three more transistors and some resistors or a micro H-Bridge one could control the motor direction either way allow true light tracking. I just really didn’t see the space to do that on a 1” board though so I’ve left it as is.
So Buzz can sit on a tabletop buzzing around until he’s happy and then settling down until he is once again disturbed by light changes or himself and he moves around again.

Buzz, Buzz, Buzz…
