12/2019
Or NOT… time will tell…
I’ve always wanted to build a two wheel balancing robot. I’ve tried with Doubtful back in 2012 using an IR sensor to see the ground in front and adjust, and then another never published Skinny that actually used an IMU but never could get the PID turning right… or coding errors were the problem. I’ll never know.
Some time ago I found FluxAxiom’s nice balancer on Thingiverse https://www.thingiverse.com/thing:2645682 and printed out the main parts. Then I put them away and left them for a couple years.
Recently I ran across the printed case cleaning some things up and went back to the Thingiverse page. There I ran across FluxAxiom’s link to Joop Brokking’s work at http://www.brokking.net/yabr_main.html and have the balancing bug again.
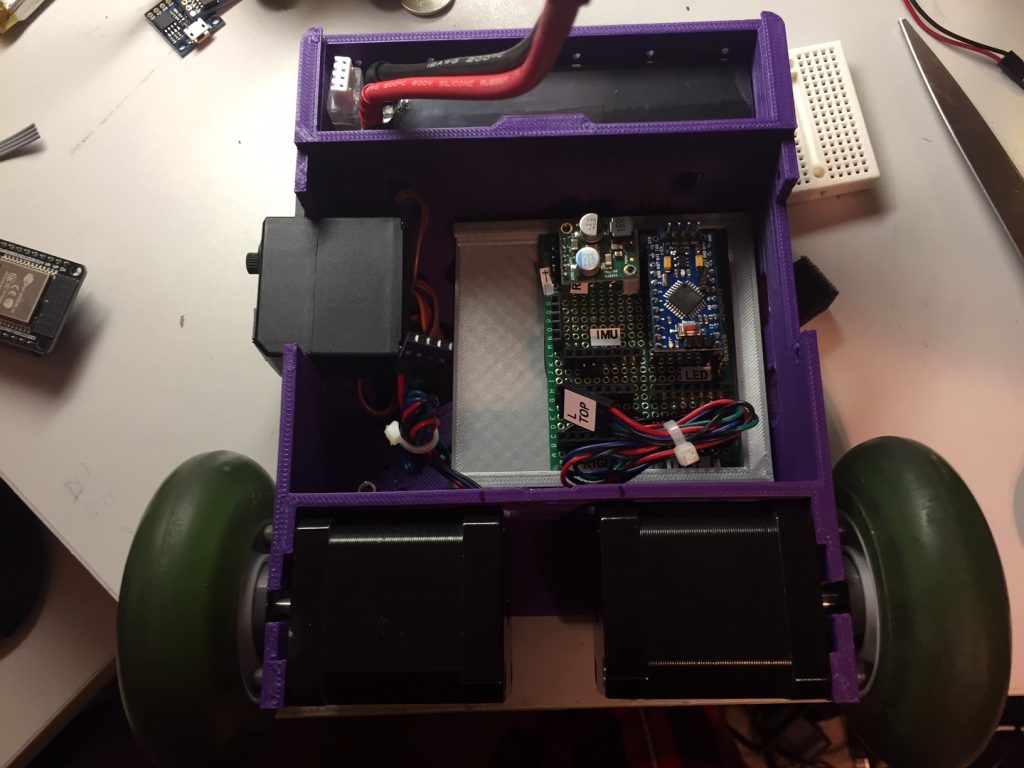
Joop’s work uses stepper motors and runs an a ProMini which I am quite familiar with. He also does an excellent job of explaining it all, including his code which is quite helpful.
